详情介绍

PQArt竞赛版是专为竞赛场景打造的工业机器人离线编程仿真软件,它在虚拟环境中模拟真实的工作环境,可以规划机器人运动路径,最后生成机器人可执行的代码,让机器人精准、简便地操作,而且自带诸多模型,比如机器人、工具、零件、底座,还支持自定义!在竞赛中选手们利用PQArt软件一展自己的才华!
软件说明
PQArt工业机器人离线编程仿真软件是北京华航唯实机器人科技股份有限公司推出的工业机器人离线编程仿真软件。经过多年的研发与行业应用,RobotArt掌握了离线编程多项核心技术,包括高性能3D平台、基于几何拓扑与历史特征的轨迹生成与规划、自适应机器人求解算法与后置生成技术、支持深度自定义的开放系统架构、事件仿真与节拍分析技术、在线数据通信与互动技术等。
它的功能覆盖了机器人集成应用完整的生命周期,包括方案设计、设备选型、集成调试及产品改型。PQArt在打磨、抛光、喷涂、涂胶、去毛刺、焊接、激光切割、数控加工、雕刻等领域有多年的积淀,并逐步形成了成熟的工艺包与解决方案。
在教育领域,PQArt着力培养新一代高素质机器人应用设计与编程人才,有大量在校学生以机器人虚拟仿真与离线编程为入口开始自己的机器人学习与从业生涯。同时,PQArt也为教育部中职、高职国赛机器人相关赛项提供技术支持,选手们在PQArt软件中一展自己的才华。
软件特色
PQArt的工作方法:它在虚拟环境中模拟真实的工作环境,规划机器人运动路径,最后生成机器人可执行的代码,让机器人精准、简便地操作。
不会编程?无所谓~ PQArt无需手动编写程序,通过一系列工作流程可直接生成代码。
没有素材?没关系~ 软件自带诸多模型:机器人、工具、零件、底座,还支持自定义!
特别说明
1 下载完成后不要在压缩包内运行软件直接使用,先解压;
2 软件同时支持32位64位运行环境;
3 如果软件无法正常打开,请右键使用管理员模式运行;
使用方法
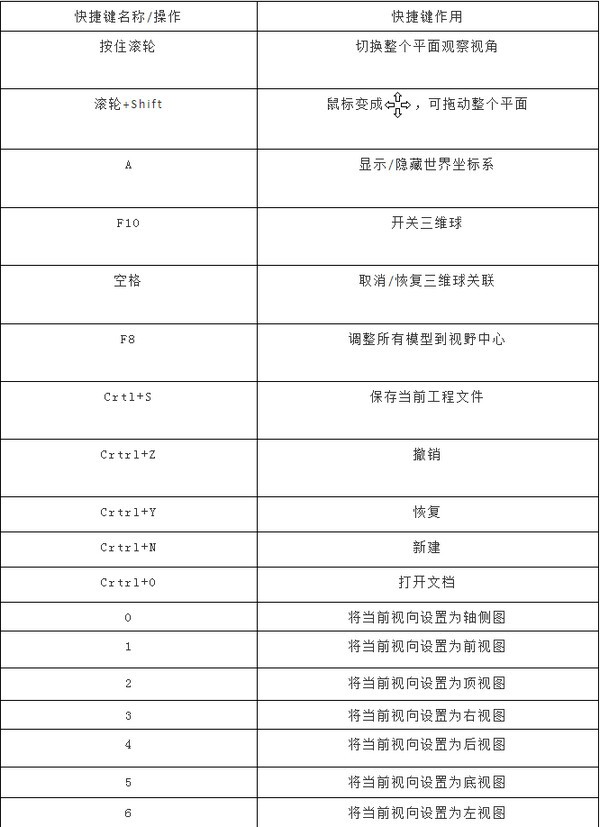
PQArt快捷键使用方法
PQArt可操作的快捷键主要是用来切换整个平面的观察视角,显示/隐藏世界坐标系,开关三维球、以及保存文件等。
以上就是软件站小编今日为大家带来的PQArt竞赛版,更多软件下载尽在软件站。

注意事项:
本站所有关于【PQArt竞赛版 v7.0.0.4061】的资源均是网友上传、开发商投稿、网络采集而来,本站不对任何资源负法律责任,所有资源请在下载后24小时内删除。
如侵犯了您的版权、商标等,请立刻联系我们并具体说明情况后,本站将尽快处理删除。